Integrate a C++ code
In this tutorial we will create an AMUSE interface to a C++ code. We will first define the legacy interface, then implement the code and finally build an object oriented interface on top of the legacy interface.
The legacy code will be a very simple and naive implementation to find 3 nearest neighbors of a particle.
The legacy code interface supports methods that transfer values to and from the code. The values do not have any units and no error handling is provided by the interface. We can add error handling, unit handling and more functions to the legacy interface by defining a subclass of a InCodeComponentImplementation (this is the objected oriented interface).
digraph layers4 { fontsize=10.0; rankdir="LR"; node [fontsize=10.0, shape=box, style=filled, fillcolor=lightyellow]; "Legacy Code" -> "Legacy Interface" -> "Object Oriented Interface" -> "Script"; }The legacy code in this tutorial will be a very simple and naive implementation to find 3 nearest neighbors of a particle.
Two paths
When defining the interface will walk 2 paths:
Management of particles in AMUSE (python)
Management of particles in the code (C or Fortran)
The first path makes sense for legacy codes that perform a transformation on the particles, or analyse the particles state or do not store any internal state between function calls (all data is external). For every function of the code, data of every particle is send to the code. If we expect multiple calls, the code would incur a high communication overhead and we are better of choosing path 2.
The second path makes sense for codes that already have management of a particles (or grid) or were we want to call multiple functions of the code and need to send the complete model to code for every function call. The code is first given the data, then calls are made to the code to evolve it’s model or perform reduction steps on the data, finally the updated data is retrieved from the code.
Procedure
The suggested procedure for creating a new interface is as follows:
Legacy Interface. Start with creating the legacy interface. Define functions on the interface to input and output relevant data. The InCodeComponentImplementation code depends on the legacy interface code.
Make a Class. Create a subclass of the InCodeComponentImplementation class
Define methods. In the legacy interface we have defined functions with parameters. In the code interface we need to define the units of the parameters and if a parameter or return value is used as an errorcode.
Define properties. Some functions in the legacy interface can be better described as a property of the code. These are read only variables, like the current model time.
Define parameters. Some functions in the legacy interface provide access to parameters of the code. Units and default values need to be defined for the parameters in this step
Define sets or grids. A code usually handles objects or gridpoints with attributes. In this step a generic interface is defined for these objects so that the interoperability between codes increases.
Before we start
This tutorial assumes you have a working amuse or amuse development build, preferrably in seperated environment (virtualenv, venv or conda etc). Please ensure that amuse is setup correctly, this can be verified by running the ‘amusifier’ .
> amusifier --help
Environment variables
It should not be necessary to set any environment variables, In exceptional cases (ie non-pip install) it may be necessary to set the ‘AMUSE_DIR’ and ‘PYTHONPATH’ and ‘PATH’.
> export AMUSE_DIR=<path to the amuse root directory>
> export PYTHONPATH=${PYTHONPATH}:${AMUSE_DIR}/src
> export PATH=${PATH}:${AMUSE_DIR}/bin
The name of our project
We will be writing a code to find the nearest neighbors of a particle, so let’s call our project ‘NearestNeighbor’.
Creating the initial directory structure
First we need to create a directory for our project and put some files in it to help build the code. The fastest method to setup the directory is by using the ‘amusifier’ script.
> amusifier --type=c --mode=dir NearestNeighbor
The script will generate a directory with all the files needed to
start our project. It also generates a very small example legacy code
with only one function `echo_int`. We can build and test our new
module:
> cd nearestneighbor/
> make
> python -c 'from interface import NearestNeighbor; print(NearestNeighbor().echo_int(10))'
10
Thank you for using AMUSE!
In this session you have used the modules below. Please cite any relevant articles:
"AMUSE (2022.6.4.dev23+g5e4ce6624)"
https://doi.org/10.5281/zenodo.4946130
[2018araa.book.....P] Portegies Zwart, S. & McMillan, S.L.W., 2018
[2013CoPhC.183..456P] ** Portegies Zwart, S. et al., 2013
[2013A&A...557A..84P] ** Pelupessy, F. I. et al., 2013
[2009NewA...14..369P] Portegies Zwart, S. et al., 2009
Note
The amusifier script can be used to generate a range of files. To
see what this file can do you can run the script with a `--help`
parameter, like so:
> amusifier --help
The Legacy Code
Normally the legacy code already exists and our task is limited to defining and implementing an interface so that AMUSE scripts can access the code. For this tutorial we will implement our legacy code.
When a legacy code is integrated all interface code is put in one directory and all the legacy code is put in a src directory placed under this directory. The amusifier script created a src directory for us, and we will put the nearest neighbor algorithm in this directory.
Go to the src directory and create a code.cc file, open this file in your favorite editor and copy and paste this code into it:
#include "code.h"
#include <math.h>
/**
* return the distance between point0 and point1
*/
double distance_between_points(
double x0, double y0, double z0,
double x1, double y1, double z1)
{
double dx = x1 - x0;
double dy = y1 - y0;
double dz = z1 - z0;
return sqrt(dx * dx + dy * dy + dz * dz);
}
class DistanceAndIndex{
public:
double r;
int index;
DistanceAndIndex():r(-1),index(-1) {}
DistanceAndIndex(DistanceAndIndex & original):r(original.r),index(original.index){}
};
/**
* Find the nearest neigbors of all the points (specified with
* x, y and z).
*
* Fills the n1, n2 and n3 arrays with the closest, second clostest
* and third closests points.
*
**/
int find_nearest_neighbors(int npoints,
double * x, double * y, double * z,
int * n0, int * n1, int * n2)
{
for(int i = 0; i < npoints; i++)
{
DistanceAndIndex found[3];
for(int j = 0; j < npoints; j++)
{
if(j == i) {
continue;
}
double x0 = x[i];
double y0 = y[i];
double z0 = z[i];
double x1 = x[j];
double y1 = y[j];
double z1 = z[j];
double r = distance_between_points(x0, y0, z0, x1, y1 , z1);
for(int k = 0; k < 3; k++) {
if(found[k].index == -1) {
found[k].index = j;
found[k].r = r;
break;
} else {
if(r < found[k].r) {
for(int l = 2;l > k; l--) {
found[l] = found[l-1];
}
found[k].index = j;
found[k].r = r;
break;
}
}
}
}
n0[i] = found[0].index;
n1[i] = found[1].index;
n2[i] = found[2].index;
}
return 0;
}
Note
This algorithm is un-optimized and has N*N order. It is not meant as very efficient code but as a readable example.
Before we can continue we also need to alter the Makefile in the src directory, so that our code.cc file is included in the build. To do so, open an editor on the Makefile and change the line:
CODEOBJS = test.o
to:
CODEOBJS = test.o code.o
Test if the code builds. As we have not coupled our algorithm to the interface we (we have not even defined an interface) we do not have any new functionality. In the legacy interface directory (not the src directory) do:
> make all
> nosetests
.
----------------------------------------------------------------------
Ran 1 test in 0.427s
OK
It works, if the test fails for any reason please check that the C++
code is correct and that worker_code exists in your directory.
Path 1
Defining the legacy interface
We will first define a legacy interface so that we can call the find_nearest_neighbors function from python. AMUSE can interact with 2 classes of functions:
A function with all scalar input and output variables. All variables are simple, non-composite variables (like int or double). For example:
int example1(double input, double *output) { *output = input; return 0; }
A function with all vector (or list) input and output variables and a length variable. The return value is a scalar value. For example:
int example2(double *input, double *output, int n) { for(int i = 0; i < n; i++) { output[i] = input[i]; } return 0; }
If you have functions that don’t follow this pattern you need to define a convert function in C++ that provides an interface following one of the two patterns supported by AMUSE.
In our case the find_nearest_neighbors complies to pattern 2 and we do not have to write any code in C++ to convert the function to a compliant interface. We only have to specify the function in python. We do so by adding a find_nearest_neighbors method to the NearestNeighborInterface class in the interface.py file. Open and editor on the interfaces.py file and add the following method to the NearestNeighborInterface class:
class NearestNeighborInterface(InCodeComponentImplementation):
#...
@legacy_function
def find_nearest_neighbors():
function = LegacyFunctionSpecification()
function.must_handle_array = True
function.addParameter(
'npoints',
dtype='int32',
direction=function.LENGTH)
function.addParameter(
'x',
dtype='float64',
direction=function.IN)
function.addParameter(
'y',
dtype='float64',
direction=function.IN)
function.addParameter(
'z',
dtype='float64',
direction=function.IN)
function.addParameter(
'n0',
dtype='int32',
direction=function.OUT)
function.addParameter(\
'n1',
dtype='int32',
direction=function.OUT)
function.addParameter(
'n2',
dtype='int32',
direction=function.OUT)
function.result_type = 'int32'
return function
In the find_nearest_neighbors method we specify every parameter of
the C++ function and the result type. For each parameter we need
to define a name, data type and whether we will input, output (or
input and output) data using this parameter. AMUSE knows only a
limited amount of data types for parameters: float64, float32, int32, string, bool and int64. We also have a special parameter, with LENGTH as
direction. This parameter is needed for all functions that follow
pattern 2, it will be filled with the length of the input arrays. We
also must specify that the function follows pattern 2 by setting
`function.must_handle_array = True`.
Save the file and recompile the code.
> make clean
> make all
> pysetest
.
----------------------------------------------------------------------
Ran 1 test in 0.427s
OK
It works! But, how do we know the find_nearest_neighbors method really works? Let’s write a test and find out. Open an editor on the test_nearestneighbor.py file and add the following method to the NearestNeighborInterfaceTests class:
def test2(self):
instance = NearestNeighborInterface()
x = [0.0, 1.0, 4.0, 7.5]
y = [0.0] * len(x)
z = [0.0] * len(x)
n0, n1, n2, error = instance.find_nearest_neighbors(x,y,z)
self.assertEquals(error[0], 0)
self.assertEquals(n0, [2,1,2,3])
self.assertEquals(n1, [3,3,4,2])
self.assertEquals(n2, [4,4,1,1])
instance.stop()
This test calls the find_nearest_neighbors method with 4 positions and checks if the nearest neighbors are determined correctly. Let’s run the test, and see if everything is working:
> pysetest
..
----------------------------------------------------------------------
Ran 2 test in 0.491s
OK
We now have a simple interface that works, but we have to do our own indexing after the call and we could send data of any unit to the method, also we have to do our own error checking after the method. Let’s define a object oriented interface to solve these problems
Defining the Object Oriented Interface
The object oriented interface sits on top of the legacy interface. It decorates this interface with sets, unit handling, state engine and more. We start creating the object oriented interface by inheriting from InCodeComponentImplementation and writing the __init__ function. The build script has added this class to the interface.py file for us. Open an editor on interface.py and make sure this code is in the file (at the end of the file):
class NearestNeighbor(InCodeComponentImplementation):
def __init__(self, **options):
InCodeComponentImplementation.__init__(self, NearestNeighborInterface(), **options)
Configuring the handlers
We configure the object oriented interface by implementing several methods. The object oriented interface is implement by several “handlers”. Each handler provides support for a specific aspect of the interface. AMUSE defines a handler for the unit conversion, a handler for the interfacing with sets of particles, a handler to ensure the methods are called in the right order, etc. Each handler is very generic and needs to be configured before use. The handler are configured using the “Visitor” pattern. The following pseudo-code shows how the handlers are configured
class InCodeComponentImplementation(object):
#...
def configure_handlers(self):
#...
for handler in self.get_all_handlers():
handler.configure(self)
def define_converter(self, handler):
""" configure the units converter handler """
handler.set_nbody_converter(...)
def define_particle_sets(self, handler):
""" configure sets of particles """
handler.define_incode_particle_set(...)
handler.set_getter(...)
class HandleConvertUnits(AbstractHandler):
#...
def configure(self, interface):
interface.define_converter(self)
class HandleParticles(AbstractHandler):
#...
def configure(self, interface):
interface.define_particle_sets(self)
Configuration of the handlers is optional, we only have to define those handler that we need in our interface. In our example we need to configure the “HandleMethodsWithUnits” handler (to define units and error handling) and the “HandleParticles” to define a particle set.
Defining methods with units
We first want to add units and error handling to the find_nearest_neighbors. We do this by creating a define_methods function on the NearestNeighbor class. Open an editor on interface.py and add this method to the class:
def define_methods(self, handler):
handler.add_method(
"find_nearest_neighbors",
(
generic_unit_system.length,
generic_unit_system.length,
generic_unit_system.length,
),
(
handler.INDEX,
handler.INDEX,
handler.INDEX,
handler.ERROR_CODE
)
)
The add_method call expects the name of the function in the legacy interface as it’s first, next it expects a list of the units of the input parameters and a list of the units of the output parameters. The return value of a function is always the last item in the list of output parameters. We specify a generic_unit_system.length unit for the x, y and z parameters. The output parameters are indices and an errorcode. The errorcode will be handled by the AMUSE interface (0 means success and < 0 means raise an exception).
Let’s write a test to see if it works, open an editor on the test_nearestneighbor.py class and add this method:
def test3(self):
instance = NearestNeighbor()
x = [0.0, 1.0, 4.0, 7.5] | generic_unit_system.length
y = [0.0] * len(x) | generic_unit_system.length
z = [0.0] * len(x) | generic_unit_system.length
n0, n1, n2 = instance.find_nearest_neighbors(x,y,z)
self.assertEquals(n0, [1,0,1,2])
self.assertEquals(n1, [2,2,3,1])
self.assertEquals(n2, [3,3,0,0])
instance.stop()
Note
This test looks a lot like test2, but we now have to define a unit and we do not need to handle the errorcode.
Now build and test the code:
> make clean; make all
> nosetests
...
----------------------------------------------------------------------
Ran 3 tests in 0.650s
OK
Note
Although we only edited python code we still need to run make. The code will check if the “worker_code” executable is up to date on every run. It cannot detect if the update broke the code but it will still demand that the code is rebuilt.
Defining the particle set
Particle sets in AMUSE can be handled by python (we call these “inmemory”) and by the legacy code (we call these “incode”). In our case the code does not handle the particles and we need to configure the particles handler to manage an inmemory particle set. Open an editor on interface.py and add this method to the NearestNeighbor class:
def define_particle_sets(self, object):
object.define_inmemory_set('particles')
That’s all we now have a “particles” attribute on the class and we can add, remove, delete particles from this set. But we are still missing a connection between the particles and the nearest neighbors. AMUSE provides no handler for this, instead, we will write a method to run the find_nearest_neighbors function and set the indices on the particles set.
Open an editor on interface.py and add this method to the NearestNeighbor class:
def run(self):
indices0, indices1, indices2 = self.find_nearest_neighbors(
self.particles.x,
self.particles.y,
self.particles.z
)
self.particles.neighbor0 = list(self.particles[indices0])
self.particles.neighbor1 = list(self.particles[indices1])
self.particles.neighbor2 = list(self.particles[indices2])
This function gets the “x”, “y” and “z” attributes from the particles set and sends these to the “find_nearest_neighbors” method. This methods returns 3 lists of indices and we need to find the particles with these indices.
Note
Particle sets have no given sequence, deletion and addition of particles will change the order of the particles in the set. It is therefor never a good idea to use the index of the particle in the set as a reference to that particle. However, in the “run” method we “own” the particle set, it cannot change between the find_nearest_neighbor call and the moment we find the particles in the set by index (using self.particles[indices0]), and in this case it is save to use index as a valid reference.
Let’s write a test and see if it works, open an editor on the test_nearestneighbor.py class and add this method:
def test4(self):
instance = NearestNeighbor()
particles = datamodel.Particles(4)
particles.x = [0.0, 1.0, 4.0, 7.5] | generic_unit_system.length
particles.y = 0.0 | generic_unit_system.length
particles.z = 0.0 | generic_unit_system.length
instance.particles.add_particles(particles)
instance.run()
self.assertEqual(instance.particles[0].neighbor0, instance.particles[1])
self.assertEqual(instance.particles[1].neighbor0, instance.particles[0])
self.assertEqual(instance.particles[2].neighbor0, instance.particles[1])
self.assertEqual(instance.particles[3].neighbor0, instance.particles[2])
instance.stop()
Now, make and run the tests:
> make clean; make all
> nosetests
....
----------------------------------------------------------------------
Ran 4 tests in 0.797s
OK
We are done, we have defined an object oriented interface on the legacy interface. Only, if we look at our tests, the code seems to be more rather than less complex. But, remember we now have units and we are compatible with other parts of amuse. And we can make more complex scripts easier.
Let’s make a plummer model and find the nearest neighbors in this model.
First make a file with the following contents, let’s call this file plummer2.py:
from interface import NearestNeighbor
from amuse.lab import *
from amuse.io import text
if __name__ == '__main__':
number_of_particles = 1000
particles = new_plummer_sphere(1000)
code = NearestNeighbor()
code.particles.add_particles(particles)
code.run()
local_particles = code.particles.copy()
delta = local_particles.neighbor1.as_set().position - local_particles.position
local_particles.dx = delta[...,0]
local_particles.dy = delta[...,1]
local_particles.dz = delta[...,2]
output = text.TableFormattedText("output.txt", set = local_particles)
output.attribute_names = ['x','y','z', 'dx', 'dy','dz']
output.store()
We can run this file with python:
.. code-block:: bash
$AMUSE_DIR/amuse.sh plummer2.py
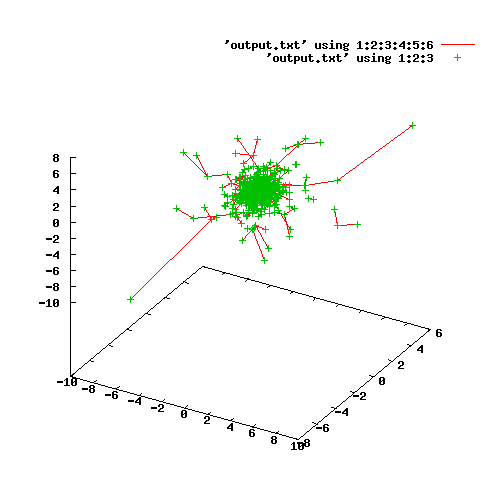
It will create an output.txt file and we can show this file with gnuplot.
gnuplot> splot 'output.txt' using 1:2:3:4:5:6 with vectors nohead, 'output.txt' using 1:2:3
gnuplot> #we can zoom into the center
gnuplot> set xr[-0.5:0.5]
gnuplot> set yr[-0.5:0.5]
gnuplot> set zr[-0.5:0.5]
gnuplot> splot 'output.txt' using 1:2:3:4:5:6 with vectors nohead, 'output.txt' using 1:2:3
Path 2
Defining the legacy interface
We define our code interface so that a user can add, update and delete particles, start the nearest neighbors finding algorithm and retrieve the ids of the nearest neighbors.
To define the interface, open interface.py with your favorite editor and replace the contents of this file with:
from amuse.community import *
class NearestNeighborInterface(CodeInterface):
include_headers = ['worker_code.h']
def __init__(self, **keyword_arguments):
CodeInterface.__init__(self, name_of_the_worker="nearestneighbor_worker", **keyword_arguments)
@legacy_function
def new_particle():
function = LegacyFunctionSpecification()
function.can_handle_array = True
function.addParameter('index_of_the_particle', dtype='int32', direction=function.OUT)
function.addParameter('x', dtype='float64', direction=function.IN)
function.addParameter('y', dtype='float64', direction=function.IN)
function.addParameter('z', dtype='float64', direction=function.IN)
function.result_type = 'int32'
return function
@legacy_function
def delete_particle():
function = LegacyFunctionSpecification()
function.addParameter('index_of_the_particle', dtype='int32', direction=function.IN)
function.result_type = 'int32'
return function
@legacy_function
def get_state():
function = LegacyFunctionSpecification()
function.can_handle_array = True
function.addParameter('index_of_the_particle', dtype='int32', direction=function.IN)
function.addParameter('x', dtype='float64', direction=function.OUT)
function.addParameter('y', dtype='float64', direction=function.OUT)
function.addParameter('z', dtype='float64', direction=function.OUT)
function.result_type = 'int32'
return function
@legacy_function
def set_state():
function = LegacyFunctionSpecification()
function.can_handle_array = True
function.addParameter('index_of_the_particle', dtype='int32', direction=function.IN)
function.addParameter('x', dtype='float64', direction=function.IN)
function.addParameter('y', dtype='float64', direction=function.IN)
function.addParameter('z', dtype='float64', direction=function.IN)
function.result_type = 'int32'
return function
@legacy_function
def find_nearest_neighbors():
function = LegacyFunctionSpecification()
function.result_type = 'int32'
return function
@legacy_function
def get_close_neighbors():
function = LegacyFunctionSpecification()
function.can_handle_array = True
function.addParameter('index_of_the_particle', dtype='int32', direction=function.IN)
function.addParameter('index_of_first_neighbor', dtype='float64', direction=function.OUT)
function.addParameter('index_of_second_neighbor', dtype='float64', direction=function.OUT)
function.addParameter('index_of_third_neighbor', dtype='float64', direction=function.OUT)
function.result_type = 'int32'
return function
@legacy_function
def get_nearest_neighbor():
function = LegacyFunctionSpecification()
function.can_handle_array = True
function.addParameter('index_of_the_particle', dtype='int32', direction=function.IN)
function.addParameter('index_of_the_neighbor', dtype='float64', direction=function.OUT)
function.addParameter('distance', dtype='float64', direction=function.OUT)
function.result_type = 'int32'
return function
@legacy_function
def get_number_of_particles():
function = LegacyFunctionSpecification()
function.can_handle_array = True
function.addParameter('value', dtype='int32', direction=function.OUT)
function.result_type = 'int32'
return function
class NearestNeighbor(InCodeComponentImplementation):
def __init__(self):
InCodeComponentImplementation.__init__(self, NearestNeighborInterface())
We can generate a stub from the interface code with:
> amusifier --type=c --mode=stub interface.py NearestNeighborInterface -o interface.cc
The generated interface.cc replaces the original file generated in the previous section.
The code builds, but does not have any functionality yet:
> make clean
> make all
Note
Compiling the interface code will result in a lot of warnings about unused dummy arguments. These warnings can be safely ignored for now.
The tests are broken (the echo_int function has been removed):
> nosetests
E
======================================================================
ERROR: test1 (nearestneighbor.test_nearestneighbor.NearestNeighborInterfaceTests)
----------------------------------------------------------------------
Traceback (most recent call last):
File "../src/amuse/test/amusetest.py", line 146, in run
testMethod()
File "nearestneighbor/test_nearestneighbor.py", line 11, in test1
result,error = instance.echo_int(12)
AttributeError: 'NearestNeighborInterface' object has no attribute 'echo_int'
----------------------------------------------------------------------
Ran 1 test in 0.315s
FAILED (errors=1)
Let’s create a working test by calling the new_particle method, open an editor on the test_nearestneighbor.py file and replace the test1 method with:
def test1(self):
instance = NearestNeighborInterface()
result,error = instance.new_particle(1.0, 1.0, 2.0)
self.assertEquals(error, 0)
self.assertEquals(result, 1)
instance.stop()
As this is python code we do not need to rebuild the code, instead we can run the tests right after saving the code. Unfortunately, when we run the test, it still fails.
> nosetests
F
======================================================================
FAIL: test1 (nearestneighbor.test_nearestneighbor.NearestNeighborInterfaceTests)
----------------------------------------------------------------------
Traceback (most recent call last):
File "/src/amuse/test/amusetest.py", line 146, in run
testMethod()
File "/nearestneighbor/test_nearestneighbor.py", line 13, in test1
self.assertEquals(result, 1)
File "/src/amuse/test/amusetest.py", line 62, in failUnlessEqual
self._raise_exceptions_if_any(failures, first, second, '{0} != {1}', msg)
File "/src/amuse/test/amusetest.py", line 49, in _raise_exceptions_if_any
raise self.failureException(msg or err_fmt_string.format(first, second, *args))
AssertionError: 0 != 1
-------------------- >> begin captured logging << --------------------
legacy: INFO: start call 'NearestNeighborInterface.new_particle'
legacy: INFO: end call 'NearestNeighborInterface.new_particle'
--------------------- >> end captured logging << ---------------------
----------------------------------------------------------------------
Ran 1 test in 0.319s
When you look closely at the output of the test you see that the result from the method is 0 and not the expected 1. We need to edit the c code to make this test work. Open an editor on interface.cc and go to the new_particle function.
int new_particle(int * index_of_the_particle, double x, double y,
double z)
{
*index_of_the_particle = 1;
return 0;
}
Note
In AMUSE all interface functions return an errorcode. Any other return values must be passed through the arguments of the functions.
We need to rebuild the code, and after building run the tests.
> make all
> pytest
.
----------------------------------------------------------------------
Ran 1 test in 0.427s
OK
The are tests work again! Only, we do not have any real working legacy code.
Filling the stubs
The implementation of the algorithm does not match the interface we defined and created. We need to write some glue code to connect the code with the interface. To do so we fill in the stubs generated earlier.
Open the interface.cc file in your favorite editor and change its contents to:
#include "worker_code.h"
#include "src/code.h"
#include <map>
class Particle{
public:
int index;
double x,y,z;
int n0, n1, n2;
Particle(int index, double x, double y, double z):index(index), x(x), y(y), z(z), n0(0), n1(0), n2(0) {
}
Particle(const Particle & original):index(original.index), x(original.x), y(original.y), z(original.z) {
}
};
typedef std::map<int, Particle *> ParticlesMap;
typedef std::map<int, Particle *>::iterator ParticlesMapIterator;
int highest_index = 0;
ParticlesMap particlesMap;
int find_nearest_neighbors(){
std::size_t n = particlesMap.size();
double * x = new double[n];
double * y = new double[n];
double * z = new double[n];
int * n0 = new int[n];
int * n1 = new int[n];
int * n2 = new int[n];
Particle ** particles = new Particle*[n];
ParticlesMapIterator i;
int c = 0;
for(i = particlesMap.begin(); i != particlesMap.end(); i++) {
Particle * p = (*i).second;
particles[c] = p;
x[c] = p->x;
y[c] = p->y;
z[c] = p->z;
c++;
}
int errorcode = find_nearest_neighbors(n, x, y, z, n0, n1, n2);
if(errorcode) {
return errorcode;
}
for(std::size_t j = 0 ; j < n; j++) {
Particle * p = particles[j];
p->n0 = n0[j] >= 0 ? particles[n0[j]]->index : -1;
p->n1 = n1[j] >= 0 ? particles[n1[j]]->index : -1;
p->n2 = n1[j] >= 0 ? particles[n2[j]]->index : -1;
}
return 0;
}
int get_nearest_neighbor(int index_of_the_particle,
double * index_of_the_neighbor, double * distance){
if(index_of_the_particle > highest_index) {
return -1;
}
Particle * p0 = particlesMap[index_of_the_particle];
Particle * p1 = particlesMap[p0->n0];
*index_of_the_neighbor = p0->n0;
*distance = distance_between_points(p0->x, p0->y, p0->z, p1->x, p1->y, p1->z);
return 0;
}
int new_particle(int * index_of_the_particle, double x, double y,
double z){
*index_of_the_particle = highest_index;
Particle * p = new Particle(highest_index, x, y, z);
particlesMap[highest_index] = p;
highest_index++;
return 0;
}
int get_close_neighbors(
int index_of_the_particle,
double * index_of_first_neighbor,
double * index_of_second_neighbor,
double * index_of_third_neighbor
){
if(index_of_the_particle > highest_index) {
return -1;
}
Particle * p = particlesMap[index_of_the_particle];
*index_of_first_neighbor = p->n0;
*index_of_second_neighbor = p->n1;
*index_of_third_neighbor = p->n2;
return 0;
}
int delete_particle(int index_of_the_particle){
if(index_of_the_particle > highest_index) {
return -1;
}
particlesMap.erase(index_of_the_particle);
return 0;
}
int set_state(int index_of_the_particle, double x, double y, double z){
if(index_of_the_particle > highest_index) {
return -1;
}
Particle * p = particlesMap[index_of_the_particle];
p->x = x;
p->y = y;
p->z = z;
return 0;
}
int get_state(int index_of_the_particle, double * x, double * y,
double * z){
if(index_of_the_particle > highest_index) {
return -1;
}
Particle * p = particlesMap[index_of_the_particle];
*x = p->x;
*y = p->y;
*z = p->z;
return 0;
}
int get_number_of_particles(int * value){
*value = (int) particlesMap.size();
return 0;
}
Test if the code builds and try it out. In the legacy interface directory do:
> make clean
> make all
> pytest
.
----------------------------------------------------------------------
Ran 1 test in 0.311s
OK
Let’s check some more functionality by adding another test
def test2(self):
instance = NearestNeighborInterface()
result,error = instance.new_particle(1.0, 1.0, 2.0)
self.assertEquals(error, 0)
self.assertEquals(result, 1)
result,error = instance.new_particle(2.0, 3.0, 2.0)
self.assertEquals(error, 0)
self.assertEquals(result, 2)
result,error = instance.new_particle(2.0, 3.0, 2.0)
self.assertEquals(error, -1)
error = instance.delete_particle(1)
self.assertEquals(error, 0)
result,error = instance.new_particle(2.0, 3.0, 2.0)
self.assertEquals(error, 0)
self.assertEquals(result, 1)
instance.stop()
The tests should succeed:
> nosetests
..
----------------------------------------------------------------------
Ran 2 tests in 0.448s
OK
We now have done everything in Step 0 Legacy Interface. We have a legacy code and can access it in our python script. But, our interface is not very friendly to work with. We have to think about errorcodes and we have not information about units. To make our interface easier to works with we start defining methods, properties and parameters.
Defining methods
The object oriented interface is also defined in the interface.py. So, we continue by opening an editor on this file. We will be writing methods for the NearestNeighbor class, in your editor seek this code (at the end of the file):
class NearestNeighbor(CodeInterface):
def __init__(self, **options):
CodeInterface.__init__(self, NearestNeighborInterface(), **options)
We will start by defining methods, we will do this by implementing the define_methods function, like so:
class NearestNeighbor(CodeInterface):
def __init__(self, **options):
CodeInterface.__init__(self, NearestNeighborInterface(), **options)
def define_methods(self, builder):
builder.add_method(
"new_particle",
(generic_unit_system.length, generic_unit_system.length, generic_unit_system.length,),
(builder.INDEX, builder.ERROR_CODE)
)
builder.add_method(
"delete_particle",
(builder.INDEX,),
(builder.ERROR_CODE)
)
builder.add_method(
"get_state",
(builder.INDEX,),
(generic_unit_system.length, generic_unit_system.length, generic_unit_system.length, builder.ERROR_CODE),
public_name = "get_position"
)
builder.add_method(
"set_state",
(builder.INDEX, generic_unit_system.length, generic_unit_system.length, generic_unit_system.length,),
(builder.ERROR_CODE),
public_name = "set_position"
)
builder.add_method(
"run",
(),
(builder.ERROR_CODE),
)
builder.add_method(
"get_close_neighbors",
(builder.INDEX,),
(builder.LINK('particles'), builder.LINK('particles'), builder.LINK('particles'), builder.ERROR_CODE),
)
builder.add_method(
"get_nearest_neighbor",
(builder.INDEX,),
(builder.LINK('particles'), generic_unit_system.length, builder.ERROR_CODE),
)
builder.add_method(
"get_number_of_particles",
(),
(builder.NO_UNIT, builder.ERROR_CODE),
)
With this code, we define the methods and specify how to interpret the arguments and return values. We get a special object (the builder object) that provides us with the add_method function to be able to this. The definition of the add_method function is as follows:
add_method(
name of the original function in the legacy interface,
list of arguments (unit or type),
list of return values,
public_name = name for the user of the class (optional)
)
For every argument or return value we can specify if it has a unit or if it is special. The special arguments are:
definition |
description |
|---|---|
builder.ERROR_CODE |
the value is interpreted as an errorcode, zero means no error for all other values and Exception will be raise, only valid for one return value. |
builder.NO_UNIT |
the value has not unit (for example for the number of items in a list) |
builder.INDEX |
the value is interpreted as an index for object identifiers |
builder.LINK(‘particles’) |
the value is interpreted as a link to objects in the set with the given name |
Test if the code builds and try it out. In the legacy interface directory do:
> make clean
> make all
Let’s add another test:
def test3(self):
instance = NearestNeighbor()
instance.set_maximum_number_of_particles(2)
instance.commit_parameters()
result = instance.new_particle(
1.0 | generic_unit_system.length,
2.0 | generic_unit_system.length,
3.0 | generic_unit_system.length
)
self.assertEquals(result, 1)
result = instance.new_particle(
1.0 | generic_unit_system.length,
1.0 | generic_unit_system.length,
2.0 | generic_unit_system.length
)
self.assertEquals(result, 2)
x,y,z = instance.get_position(1)
self.assertEquals(1.0 | generic_unit_system.length, x)
self.assertEquals(2.0 | generic_unit_system.length, y)
self.assertEquals(3.0 | generic_unit_system.length, z)
instance.stop()
And run the tests:
> nosetests
...
----------------------------------------------------------------------
Ran 3 tests in 0.664s
OK
As you can see our script is now a little simpler and we support units. We do not have to think about the errorcodes in this script, AMUSE will interpret the errorcodes and raise the right exceptions if needed. The units are also automatically converted to the right units for the code. But the script is still not very easy and we have to manage all the ids we get from the code. To make our code even easier to handle we will continue by defining a set.
Note
We skip defining parameters and properties, we will come back to this in the next tutorial.
Defining a set
We have made our interface a little easier but we still have to do a some management work in our script. We would like to work with objects and adding or removing these objects from the code. AMUSE supports this by defining sets. Each set is capable of storing specific attributes of the objects in the set. Our code is capable of storing the x, y and z position of an object. An object in AMUSE is called a Particle and the sets that contain these particles are called ParticleSets or shorter Particles.
We define our particle set by implementing a define_particle_sets function on our NearestNeighbor class like so:
class NearestNeighbor(InCodeComponentImplementation):
def __init__(self, **options):
InCodeComponentImplementation.__init__(self, NearestNeighborInterface(), **options)
def define_methods(self, builder):
...
def define_particle_sets(self, builder):
builder.define_set('particles', 'index_of_the_particle')
builder.set_new('particles', 'new_particle')
builder.set_delete('particles', 'delete_particle')
builder.add_setter('particles', 'set_position')
builder.add_getter('particles', 'get_position')
builder.add_getter('particles', 'get_close_neighbors', names=('neighbor0', 'neighbor1', 'neighbor2') )
That’s all, we now have defined a set called particles. Again, we get a builder object to use in defining our set. All methods have the name of the set as their first argument, this name can be any name you want, but in AMUSE most codes provide a set called particles. For the add_setter, add_getter, set_new and set_delete functions, the second argument is the name of the method we defined in the previous step. Finally you can set the name of the attribute in the particles set with the names argument. This is optional for legacy functions, if not given the names of the attributes will be derived from the names of the arguments in the original calls. For example, the get_position call we specified earlier has parameter name x, y and z, these names are also used in the particles set.
Test if the code builds and try it out. In the legacy interface directory do:
> make clean
> make all
Let’s add another test:
def test4(self):
instance = NearestNeighbor()
instance.set_maximum_number_of_particles(100)
instance.commit_parameters()
particles = datamodel.Particles(4)
particles.x = [0.0, 1.0, 4.0, 7.5] | generic_unit_system.length
particles.y = 0.0 | generic_unit_system.length
particles.z = 0.0 | generic_unit_system.length
instance.particles.add_particles(particles)
instance.run()
self.assertEqual(instance.particles[0].neighbor0, instance.particles[1])
self.assertEqual(instance.particles[1].neighbor0, instance.particles[0])
self.assertEqual(instance.particles[2].neighbor0, instance.particles[1])
self.assertEqual(instance.particles[3].neighbor0, instance.particles[2])
instance.stop()
The support for a particle set means we can now also interact with other parts of AMUSE. Let’s make a plummer model and find the nearest neighbors in this model.
First make a file with the following contents, let’s call this file plummer2.py:
from interface import NearestNeighbor
from amuse.lab import *
from amuse.io import text
if __name__ == '__main__':
number_of_particles = 1000
particles = new_plummer_sphere(1000)
code = NearestNeighbor()
code.particles.add_particles(particles)
code.run()
local_particles = code.particles.copy()
delta = local_particles.neighbor1.as_set().position - local_particles.position
local_particles.dx = delta[...,0]
local_particles.dy = delta[...,1]
local_particles.dz = delta[...,2]
output = text.TableFormattedText("output.txt", set = local_particles)
output.attribute_names = ['x','y','z', 'dx', 'dy','dz']
output.store()
We can run this file with python:
.. code-block:: bash
$AMUSE_DIR/amuse.sh plummer2.py
It will create an output.txt file and we can show this file with gnuplot.
gnuplot> splot 'output.txt' using 1:2:3:4:5:6 with vectors nohead, 'output.txt' using 1:2:3
gnuplot> #we can zoom into the center
gnuplot> set xr[-0.5:0.5]
gnuplot> set yr[-0.5:0.5]
gnuplot> set zr[-0.5:0.5]
gnuplot> splot 'output.txt' using 1:2:3:4:5:6 with vectors nohead, 'output.txt' using 1:2:3